首页| 新闻| 科技| 人物| 科学| 话题| 运营| 设计| 开发| 服务器| 学院| 产品| 网文| 娱乐| 游戏| 图片
[1] [2] 下一页
为什么越来越多的网站域名不加
jq判断输入框必填(适合多条件搜
windows wamp中配置安装xhprof步骤
校园甜美的背影,洋溢着青春烂漫的回忆
南国有佳人,容华若桃李
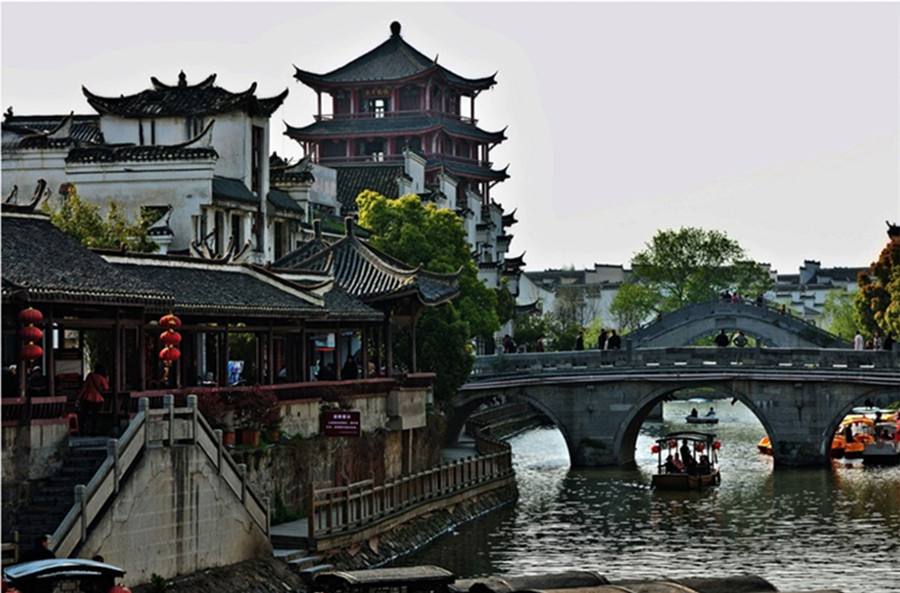
游览三河古镇景点:望月阁、古民居、一人巷
大蜀山森林公园美景
路边摊小吃 酒香不怕巷子深
特色路边摊小吃 下班路上的一道美食
爷爷都是从孙子走过来的
我太帅了,睡不着咋整啊
新闻热点
疑难解答
图片精选
Maya建模技术:Maya 完成透明贴图
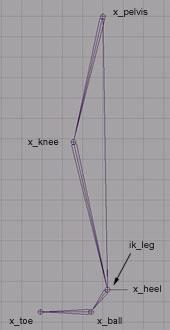
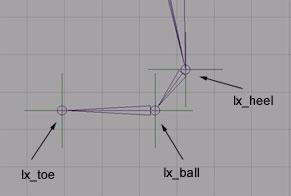
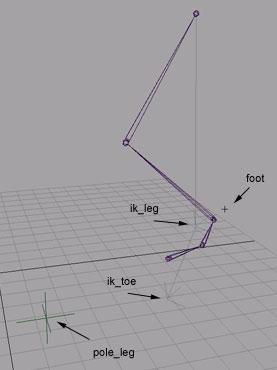
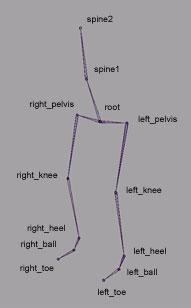
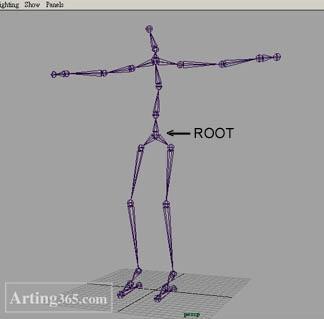
Maya基础教程:MaYa Skeleton 教学
Maya基础教程:Maya 硬件渲染粒子与
网友关注